Method Overview
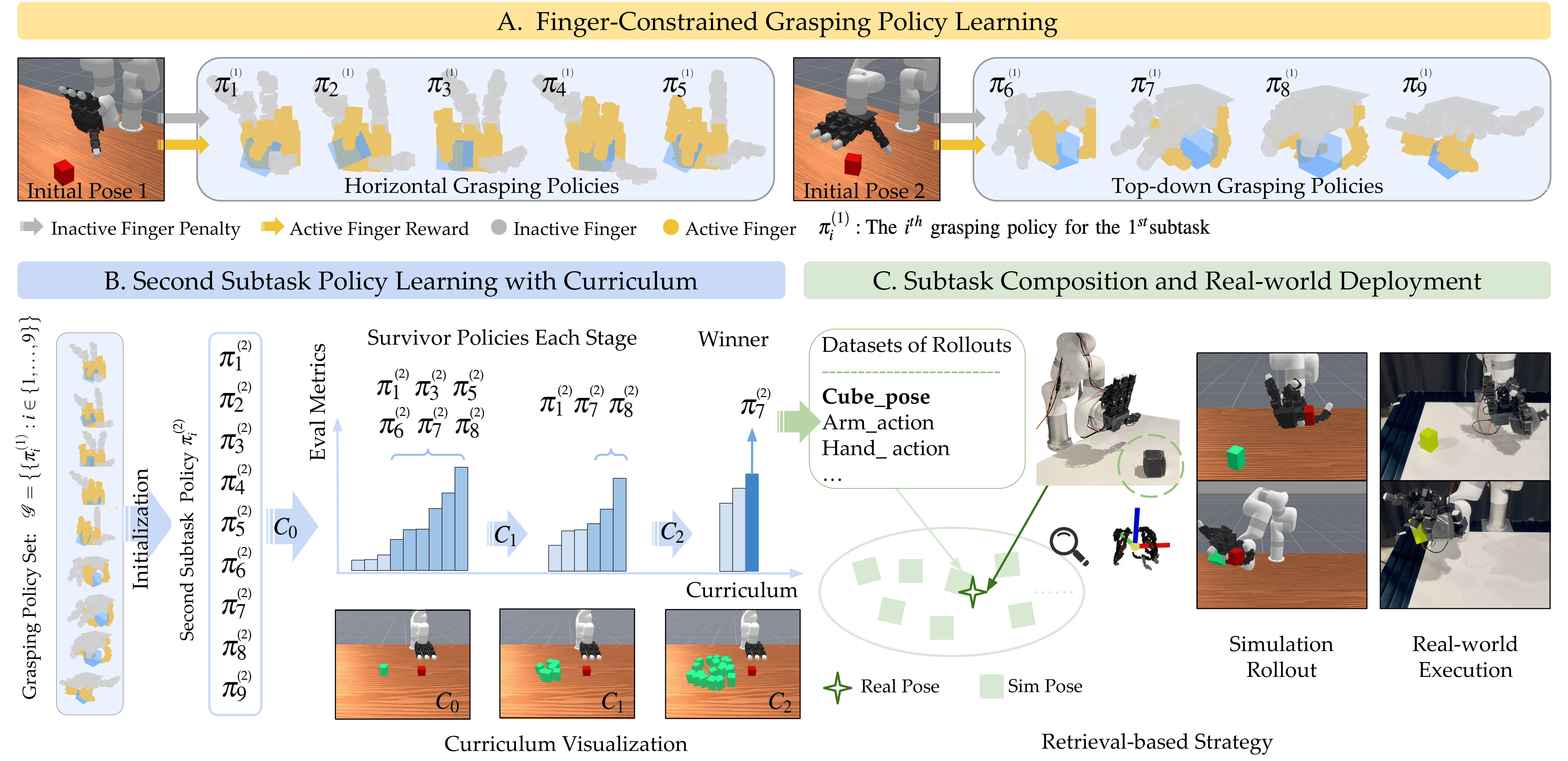
A. We train set of nine resource-aware one and two-finger grasping policies that leave fingers free for
our diverse suite of second-subtasks.
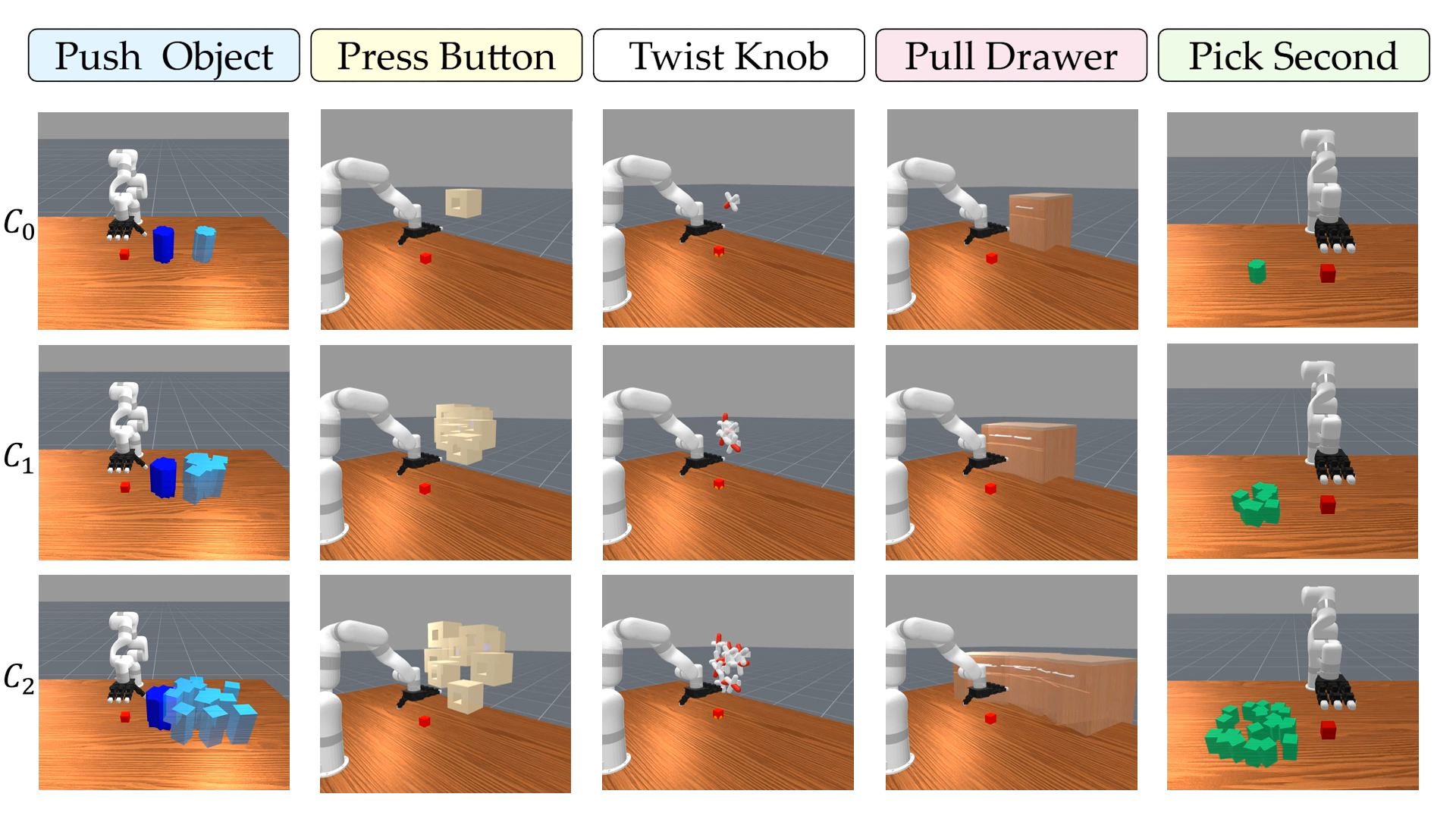
B. We then use a curriculum-based method to select and train the best grasps for each second-subtask environment,
removing grasps that perform poorly in the initial, limited randomization stages.
C. Finally, taking the best grasp for each task and its corresponding second-subtask policy, we roll out these policies
and collect trajectories in each of our grasp + second-subtask environments. Then, to transfer to real, we first fix the position of the
second-subtask object and then replay the trajectory whose first block position best matches the current position of the block in the
real world.
A. We train set of nine resource-aware one and two-finger grasping policies that leave fingers free for our diverse suite of second-subtasks.
B. We then use a curriculum-based method to select and train the best grasps for each second-subtask environment, removing grasps that perform poorly in the initial, limited randomization stages.
C. Finally, taking the best grasp for each task and its corresponding second-subtask policy, we roll out these policies and collect trajectories in each of our grasp + second-subtask environments. Then, to transfer to real, we first fix the position of the second-subtask object and then replay the trajectory whose first block position best matches the current position of the block in the real world.